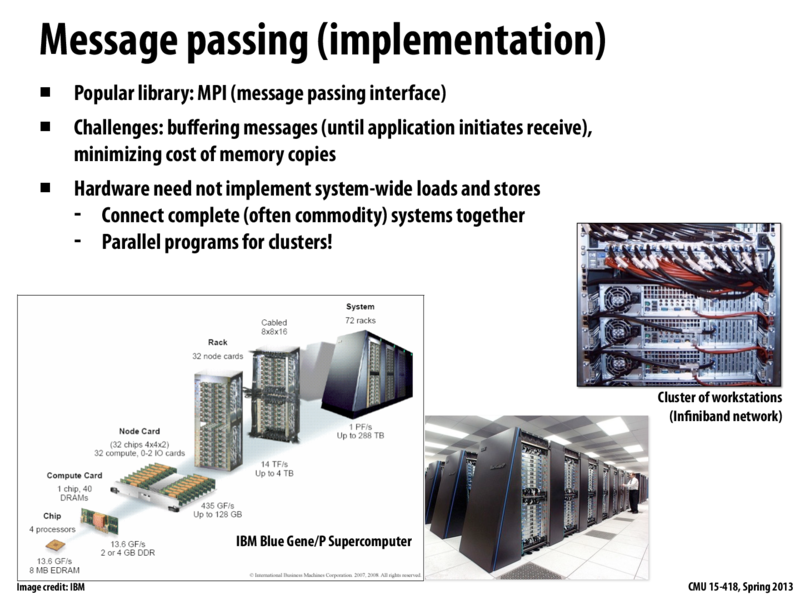
The "challenges" mentioned in the slide above were discussed in lecture. In class we discussed how we might implement message passing systems where all we have is the traditional shared address space form of communication. One way to have message passing work on such systems is to assign each thread, worker, or "process" (in the pi calculus jargon) a mailbox in memory, or some tag to retrieve messages. From this point there are two approaches to take.
If you want asynchronous message passing (so that a data sender does not block while waiting for the receiver to collect data) the sender simply takes a lock and writes to the mailbox queue, and the receiver will simply pull the first message that came in off the queue. There are scalability issues with this approach, as the sender could send arbitrarily many messages before a receiver decides to take a message, which means that the system would basically need to provide an unbounded buffer for this to work perfectly.
The other approach is to have a synchronous message send, where the sending process blocks until the receiver is ready. Then both processes sync up, and the sending process can copy into the receiver's address space. Disadvantages are that messages are not necessarily queued up anymore, but more importantly the sending process cannot do any work while waiting for the receiver. This behooves receivers to keep checking messages more often, since not doing so could block senders indefinitely. However, if you think about it such a message passing system can actually be used as a crude thread barrier: just send a tiny amount of data and make multiple receivers receive it before moving forward in execution.
Example of this from obscure OSes: the rendezvous() system call in Plan 9 implemented a synchronous message passing system. The system call took a tag and a small amount of data. If two processes called rendezvous() with the same tag, they would swap data items. The more you know!
The "challenges" mentioned in the slide above were discussed in lecture. In class we discussed how we might implement message passing systems where all we have is the traditional shared address space form of communication. One way to have message passing work on such systems is to assign each thread, worker, or "process" (in the pi calculus jargon) a mailbox in memory, or some tag to retrieve messages. From this point there are two approaches to take.
If you want asynchronous message passing (so that a data sender does not block while waiting for the receiver to collect data) the sender simply takes a lock and writes to the mailbox queue, and the receiver will simply pull the first message that came in off the queue. There are scalability issues with this approach, as the sender could send arbitrarily many messages before a receiver decides to take a message, which means that the system would basically need to provide an unbounded buffer for this to work perfectly.
The other approach is to have a synchronous message send, where the sending process blocks until the receiver is ready. Then both processes sync up, and the sending process can copy into the receiver's address space. Disadvantages are that messages are not necessarily queued up anymore, but more importantly the sending process cannot do any work while waiting for the receiver. This behooves receivers to keep checking messages more often, since not doing so could block senders indefinitely. However, if you think about it such a message passing system can actually be used as a crude thread barrier: just send a tiny amount of data and make multiple receivers receive it before moving forward in execution.
Example of this from obscure OSes: the rendezvous() system call in Plan 9 implemented a synchronous message passing system. The system call took a tag and a small amount of data. If two processes called rendezvous() with the same tag, they would swap data items. The more you know!
This comment was marked helpful 0 times.