Let's compare the functionality of an atomic bus to this new, split-transaction bus. Say P1 wants to issue a BusRd command, and P2 wants to follow-up with a BusUpg command to all processors. Note that the BusRd command consists of two phases: a request phase (notifying memory of the request over the bus) and a response phase (memory sending back the appropriate data on the bus, after servicing the request). In an atomic bus, both phases of the first BusRd have to completely finish before the BusUpg command can be handled. However, in a split-transaction bus, request and response transactions are split into two, decoupled phases. That means that after P1 has issued its BusRd request (with the response coming at some point in the future), P2 can immediately issue its BusUpg request (I believe BusUpg's don't really have a response phase). The BusRd response eventually gets placed by memory onto the bus.
As discussed on the next slide however, split-transaction buses introduce new problems to consider.
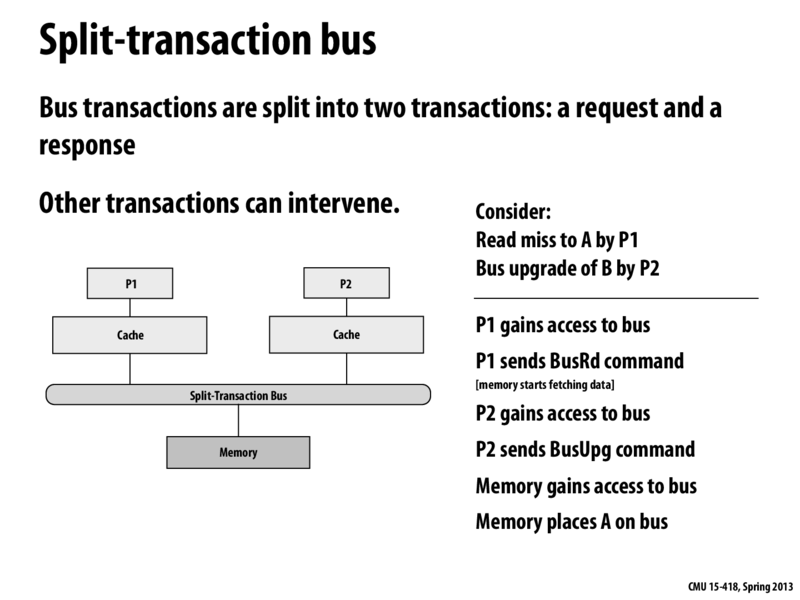
Let's compare the functionality of an atomic bus to this new, split-transaction bus. Say P1 wants to issue a BusRd command, and P2 wants to follow-up with a BusUpg command to all processors. Note that the BusRd command consists of two phases: a request phase (notifying memory of the request over the bus) and a response phase (memory sending back the appropriate data on the bus, after servicing the request). In an atomic bus, both phases of the first BusRd have to completely finish before the BusUpg command can be handled. However, in a split-transaction bus, request and response transactions are split into two, decoupled phases. That means that after P1 has issued its BusRd request (with the response coming at some point in the future), P2 can immediately issue its BusUpg request (I believe BusUpg's don't really have a response phase). The BusRd response eventually gets placed by memory onto the bus.
As discussed on the next slide however, split-transaction buses introduce new problems to consider.
This comment was marked helpful 0 times.