If I recall correctly from lecture, whenever someone issues a "shoutout," the snoop-valid wire is set to high, and as each processor responds, it stops asserting high, and we know that every processor has responded to the shoutout when the snoop-valid wire goes to zero. I think I'm a little confused on what exactly causes the valid wire to be set to high, or who initially sets it. The idea that every processor stops asserting on the wire once it responds to the shoutout indicates to me that we require each processor assert high immediately after the shoutout, and that the valid wire is set to high as a result of each processor asserting high on it. If this is true, what if we have a scenario like the fetch deadlock example toward the end of the lecture, and every processor is issuing a BusRd and waiting for everyone else to respond instead of responding itself? Wouldn't the valid wire never be set to high?
This comment was marked helpful 0 times.
vrkrishn
Take the example that Processor A wants to read a variable x; by the MESI protocol it must wait for all other processors to check to see if the data is in their cache lines to determine whether to load to Shared or Exclusive. First Processor A get permission from the controller to shout a BusRd over the bus.
Processor B and Processor C are listening to the bus at this. When they hear the BusRd, they immediately drive a high voltage through the valid wire and begin to process the request (determining whether the data is in the current cache line, whether the line in the cache needs to be flushed or not, etc). As soon as B and C finish their tasks, they immediately assert low on the valid wire.
Now keeping this in mind, we can respond to the situation caused by issuing many commands to read from all processors at the same time. First of all, each processor has to get permission from the bus controller before it will issue a BusRd shout. However, even if a processor is waiting to issue a command, it can still respond to signals that are conveyed across the bus. To quote the slide "To avoid deadlock, processors must be able to service incoming transactions while waiting to issue requests".
Thus even if a processor has a read operation trying to be executed, on a well-designed snooping system this will not lock out the computational capacity of the processor or processor cache. A possible implementation of such a system that uses a separate bus controller and processor control for each cache could be extended to allow processors to wait for permission on a task while simultaneously looking for cache lines. However, I am not sure if a sort of cache ILP is how this is actually implemented.
This comment was marked helpful 6 times.
taegyunk
Question: Is it correct that a wire could only have 1 or 0 as its value?
Does high mean its value is 1?
This comment was marked helpful 0 times.
bwasti
yes, I think that is the correct way to think about it.
This comment was marked helpful 0 times.
eatnow
Somehow it seems that there should be more than what is described here:
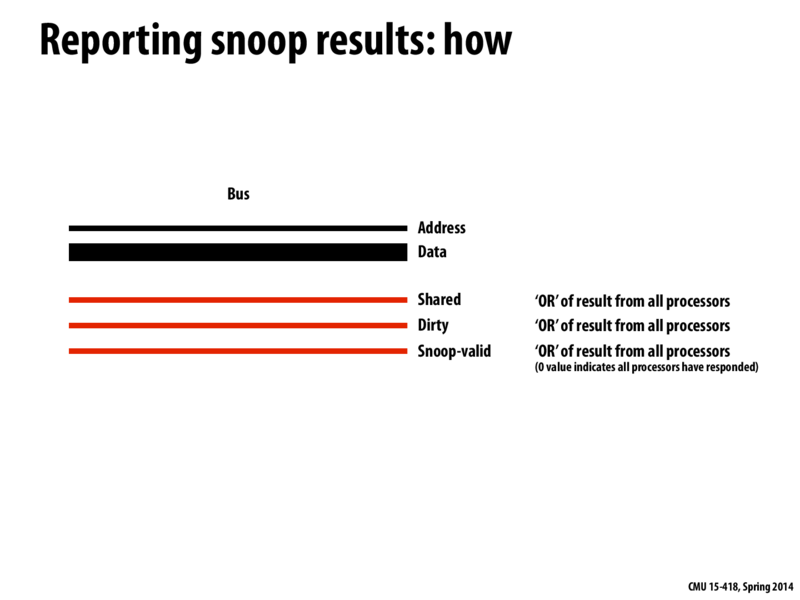
We are relying on the Snoop-valid wire because we cannot tell when every processor has updated the voltage on Shared and Dirty.
But if so, how do we know that every processor has raised the voltage on the Snoop-valid wire in the first place? What if processor A does not set Snoop-valid to high in time, and the rest of the processors do their thing, and as a result processor A loses its chance to respond?
I am guessing the underlying problem is that checking with the cache for the shared/dirty bit is slower, and also more inconsistent in terms of the time it takes, relative to just responding and immediately raising the voltage on the Snoop-valid wire. Can someone with more hardware knowledge confirm/correct this?
This comment was marked helpful 0 times.
selena731
We know because the bus isn't really just a set of wires, which connects a bunch of processors, memory and I/O devices. In addition to that, there's a ton of logic that exists in reality, which is responsible for determining things like, who gets the bus and when, what devices said what, "oh something important happened, let's interrupt all processors to do ____".
Think of ^ that as the control bus. Maybe this picture will help?
So to answer your question, I'd guess the Shared, Dirty, Snoop-Valid lines in the diagram could be part of the control bus, which uses a form of logic + some enable bits + a clock to make sure everything gets communicated on time.
(And I was only thinking of single bus systems, nowadays you have more complex systems, i.e. Lecture 17, and I'm not 100% sure how the architecture of those looks like)
This comment was marked helpful 0 times.
mofarrel
@sluck
To add to vrkrishn. We can easily design a system where all processors caches set the snoop valid line to high after another processor is granted access to the bus. This can be achieved using a simple hardware thread in each processors cache. This thread must set the snoop valid line to high the cycle after seeing another cache get granted the bus. This would guarantee that the cache that was granted the bus does not see the snoop as being ready before other caches have responded. After the hardware thread sets snoop valid to high, the cache can set it to low after asserting the correct values on the shared and dirty lines.
This comment was marked helpful 0 times.
rokhinip
@sluck, to address your question about a possible fetch deadlock, this won't happen because we have ensured in this example that we have an atomic bus which means that no other commands happen between the BusRd/BusRdX and the processor receiving the data. (Refer to previous slides).
If I recall correctly from lecture, whenever someone issues a "shoutout," the snoop-valid wire is set to high, and as each processor responds, it stops asserting high, and we know that every processor has responded to the shoutout when the snoop-valid wire goes to zero. I think I'm a little confused on what exactly causes the valid wire to be set to high, or who initially sets it. The idea that every processor stops asserting on the wire once it responds to the shoutout indicates to me that we require each processor assert high immediately after the shoutout, and that the valid wire is set to high as a result of each processor asserting high on it. If this is true, what if we have a scenario like the fetch deadlock example toward the end of the lecture, and every processor is issuing a BusRd and waiting for everyone else to respond instead of responding itself? Wouldn't the valid wire never be set to high?
This comment was marked helpful 0 times.
Take the example that Processor A wants to read a variable x; by the MESI protocol it must wait for all other processors to check to see if the data is in their cache lines to determine whether to load to Shared or Exclusive. First Processor A get permission from the controller to shout a BusRd over the bus.
Processor B and Processor C are listening to the bus at this. When they hear the BusRd, they immediately drive a high voltage through the valid wire and begin to process the request (determining whether the data is in the current cache line, whether the line in the cache needs to be flushed or not, etc). As soon as B and C finish their tasks, they immediately assert low on the valid wire.
Now keeping this in mind, we can respond to the situation caused by issuing many commands to read from all processors at the same time. First of all, each processor has to get permission from the bus controller before it will issue a BusRd shout. However, even if a processor is waiting to issue a command, it can still respond to signals that are conveyed across the bus. To quote the slide "To avoid deadlock, processors must be able to service incoming transactions while waiting to issue requests".
Thus even if a processor has a read operation trying to be executed, on a well-designed snooping system this will not lock out the computational capacity of the processor or processor cache. A possible implementation of such a system that uses a separate bus controller and processor control for each cache could be extended to allow processors to wait for permission on a task while simultaneously looking for cache lines. However, I am not sure if a sort of cache ILP is how this is actually implemented.
This comment was marked helpful 6 times.
Question: Is it correct that a wire could only have 1 or 0 as its value?
Does high mean its value is 1?
This comment was marked helpful 0 times.
yes, I think that is the correct way to think about it.
This comment was marked helpful 0 times.
Somehow it seems that there should be more than what is described here: We are relying on the Snoop-valid wire because we cannot tell when every processor has updated the voltage on Shared and Dirty.
But if so, how do we know that every processor has raised the voltage on the Snoop-valid wire in the first place? What if processor A does not set Snoop-valid to high in time, and the rest of the processors do their thing, and as a result processor A loses its chance to respond?
I am guessing the underlying problem is that checking with the cache for the shared/dirty bit is slower, and also more inconsistent in terms of the time it takes, relative to just responding and immediately raising the voltage on the Snoop-valid wire. Can someone with more hardware knowledge confirm/correct this?
This comment was marked helpful 0 times.
We know because the bus isn't really just a set of wires, which connects a bunch of processors, memory and I/O devices. In addition to that, there's a ton of logic that exists in reality, which is responsible for determining things like, who gets the bus and when, what devices said what, "oh something important happened, let's interrupt all processors to do ____".
Think of ^ that as the control bus. Maybe this picture will help?
So to answer your question, I'd guess the Shared, Dirty, Snoop-Valid lines in the diagram could be part of the control bus, which uses a form of logic + some enable bits + a clock to make sure everything gets communicated on time.
(And I was only thinking of single bus systems, nowadays you have more complex systems, i.e. Lecture 17, and I'm not 100% sure how the architecture of those looks like)
This comment was marked helpful 0 times.
@sluck
To add to vrkrishn. We can easily design a system where all processors caches set the snoop valid line to high after another processor is granted access to the bus. This can be achieved using a simple hardware thread in each processors cache. This thread must set the snoop valid line to high the cycle after seeing another cache get granted the bus. This would guarantee that the cache that was granted the bus does not see the snoop as being ready before other caches have responded. After the hardware thread sets snoop valid to high, the cache can set it to low after asserting the correct values on the shared and dirty lines.
This comment was marked helpful 0 times.
@sluck, to address your question about a possible fetch deadlock, this won't happen because we have ensured in this example that we have an atomic bus which means that no other commands happen between the BusRd/BusRdX and the processor receiving the data. (Refer to previous slides).
This comment was marked helpful 0 times.